|
Anuruddha Bhattacharjee I am a Postdoctoral Fellow in the IMERSE Lab at the Johns Hopkins Laboratory for Computational Sensing and Robotics (LCSR), advised by Dr. Axel Krieger. My research focuses on developing wireless millirobots, surgical tools, and intelligent control systems for minimally invasive procedures and targeted drug delivery. I also explore multi-robot actuation strategies in collaboration with Dr. Yancy Diaz-Mercado and the Collaborative Controls and Robotics Lab at the University of Maryland. In addition to my primary work in medical robotics, I lead a robotics team in the AIMD Laboratory, where I collaborate with materials scientists and engineers in the Hopkins Extreme Materials Institute (HEMI) to automate a high-throughput, laser-driven micro-flyer impact system for AI-driven integrated materials design. I received my Ph.D. in Mechanical Engineering from Southern Methodist University, where I worked in the BAST Lab under the guidance of Dr. MinJun Kim and Dr. Aaron T. Becker. My doctoral research focused on the design, dynamics, and motion planning of reconfigurable modular robots. I also developed bioinspired soft millirobots and studied their locomotion in complex fluidic environments in collaboration with Dr. Henry Fu and the Fluids and Biomechanics Lab at the University of Utah. Prior to graduate school, I served as a Lecturer in the Department of Mechanical Engineering at Sonargaon University in Dhaka. I earned my B.Sc. in Mechanical Engineering from Bangladesh University of Engineering and Technology (BUET), where I conducted research in computational heat transfer with a focus on optimizing industrial heat exchanger design. |

|
ResearchMy research lies at the intersection of robotics and healthcare, with a focus on the design, control, and automation of intelligent mesoscale robotic systems that interact with complex physiological environments. I specialize in integrating miniaturized mechanical designs with electromagnetic actuation, computer vision, and real-time control algorithms to enable autonomous operation of wireless surgical tools, millirobots, and soft robotic systems in dynamic, unstructured environments. I envision a future where medical robotics is transformed by wireless, miniaturized systems capable of navigating the human body with precision—enabling ultra-minimally invasive surgery and diagnostics without the need for large incisions or bulky instruments. My research aims to realize this vision by developing innovative robotic platforms and control strategies that enhance the capabilities of medical professionals and improve patient outcomes. To advance this vision, I am exploring the following research directions:
|
PublicationsI have contributed to 12 journal articles (7 as first author) and 14 peer-reviewed conference papers (3 as first author). My full publication list is available on Google Scholar.
† Co-first authors, * Corresponding authors
Journal Articles |
|
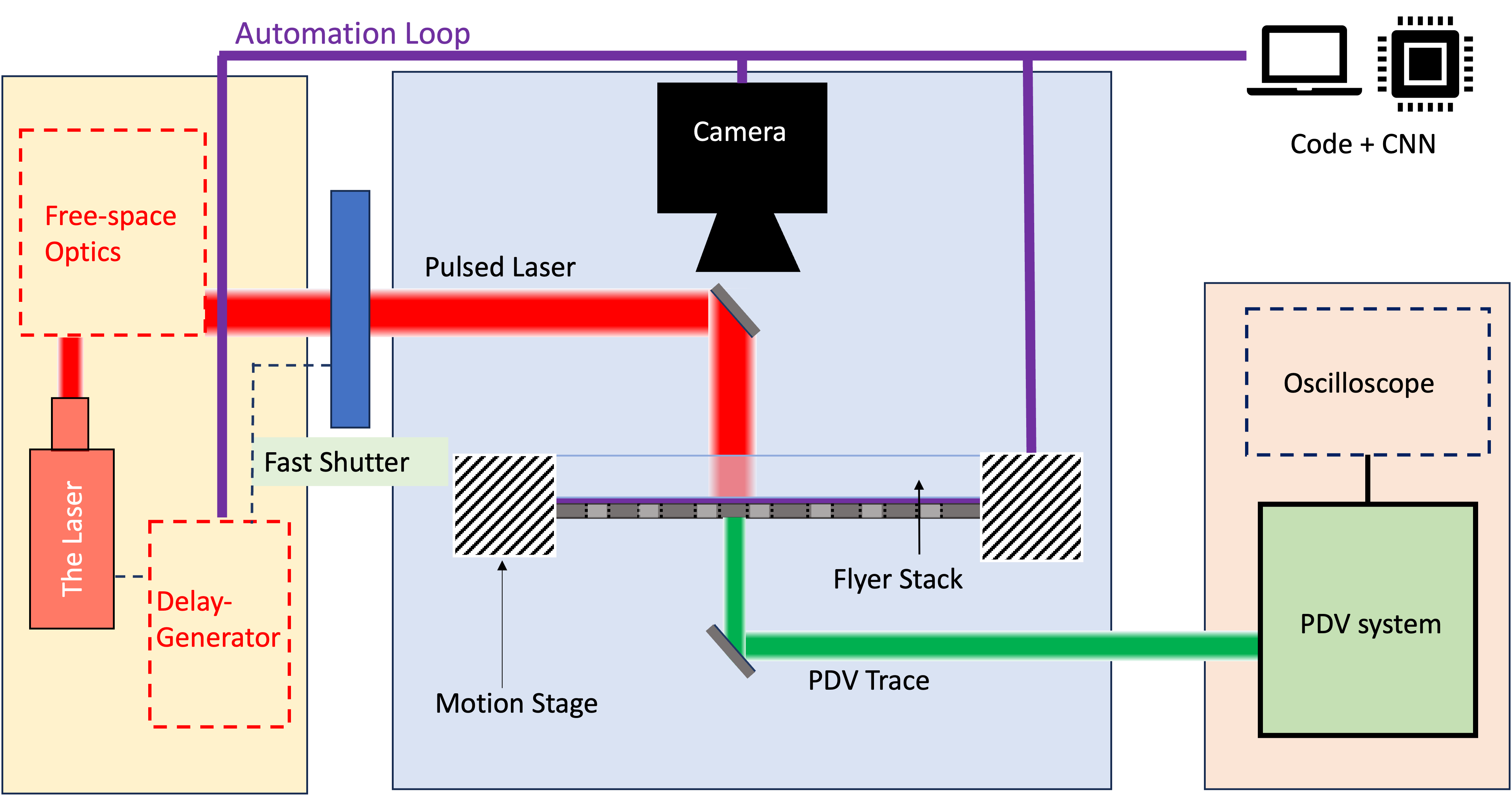
[J-12] Closed-Loop Automation of a High-Throughput Laser-Driven Impact System for Accelerated Shock Physics Discovery
Anuruddha Bhattacharjee*, Konrad Muly, Piyush Wanchoo, S Arjun Sreedhar, Lucas Rackers, Joel Rentas-Velez, Pranav Addepalli, K.T. Ramesh, Axel Krieger* In Review, IEEE Transactions on Automation Science and Engineering (T-ASE), 2026 The system presented in this work automates the full workflow of laser-driven micro-flyer impact testing, including flyer detection and alignment, laser triggering, data acquisition, and parameter and result logging. With this system, thousands of high-quality experiments can be conducted per day with minimal human supervision. |
|
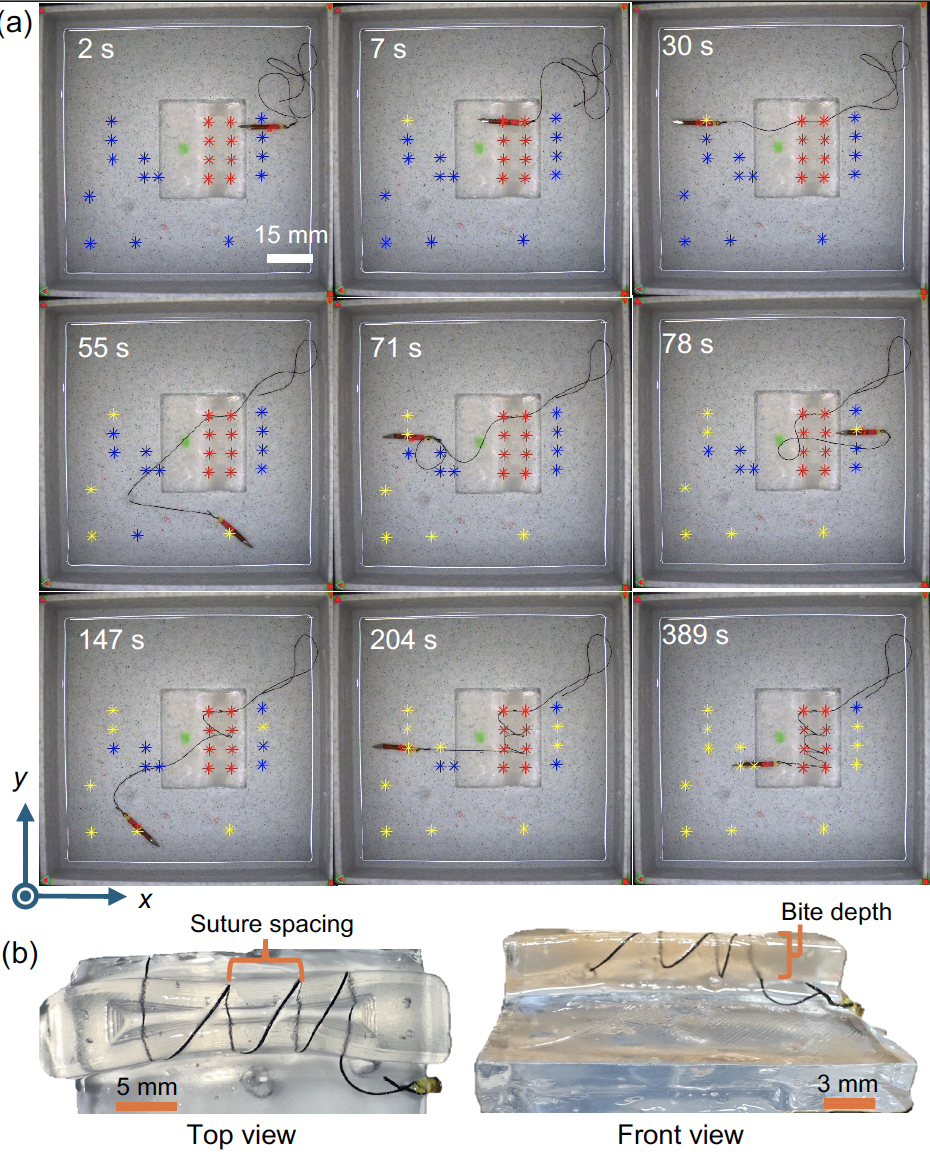
[J-11] Magnetically Actuated Modular Millirobots for On-Demand Targeted Cardiac Drug Delivery
Anuruddha Bhattacharjee*, Suraj Raval, Xinhao Chen, Adam May, Ayush Saraswat, Chintan Panigrahi, Yash Chadda, Lamar O. Mair, Joseph Katz, Yancy Diaz-Mercado, Axel Krieger* In Review, Advanced Materials Technologies, 2026 This work presents wireless modular millirobots with autonomous navigation, tissue penetration, and on-demand docking/undocking for targeted drug delivery in a heart phantom under pulsatile flow. |
|
[J-10] Autonomous Soft Robotic Guidewire Navigation via Imitation Learning
Noah Barnes, Ji Woong Kim, Lingyun Di, Hannah Qu, Anuruddha Bhattacharjee, Miroslaw Janowski, Dheeraj Gandhi, Bailey Felix, Shaopeng Jiang, Olivia Young, Mark Fuge, Ryan D. Sochol, Jeremy D. Brown, and Axel Krieger* In Review, IEEE Robotics and Automation Letters (RA-L), 2026 This work presents a transformer-based imitation learning framework with goal conditioning, relative action outputs, and automatic contrast dye injections to enable generalizable soft robotic guidewire navigation in an aneurysm targeting task. |
|
[J-09] Closed-Loop Self-Assembly and Navigation of Magnetic Modular Millibots in Confined Environments
Anuruddha Bhattacharjee, Zhengguang Wang, Arne Schmidt, Aaron T. Becker*, Min Jun Kim* In Review, IEEE Transactions on Automation Science and Engineering (T-ASE), 2026 This work presents magnetically actuated modular millibots capable of autonomous self-assembly, wall climbing, and closed-loop navigation using a vision-based feedback controller that integrates a harmonic traveling salesman problem (HTSP) solver with motion dynamics for obstacle-aware, deterministic self-assembly. |
|
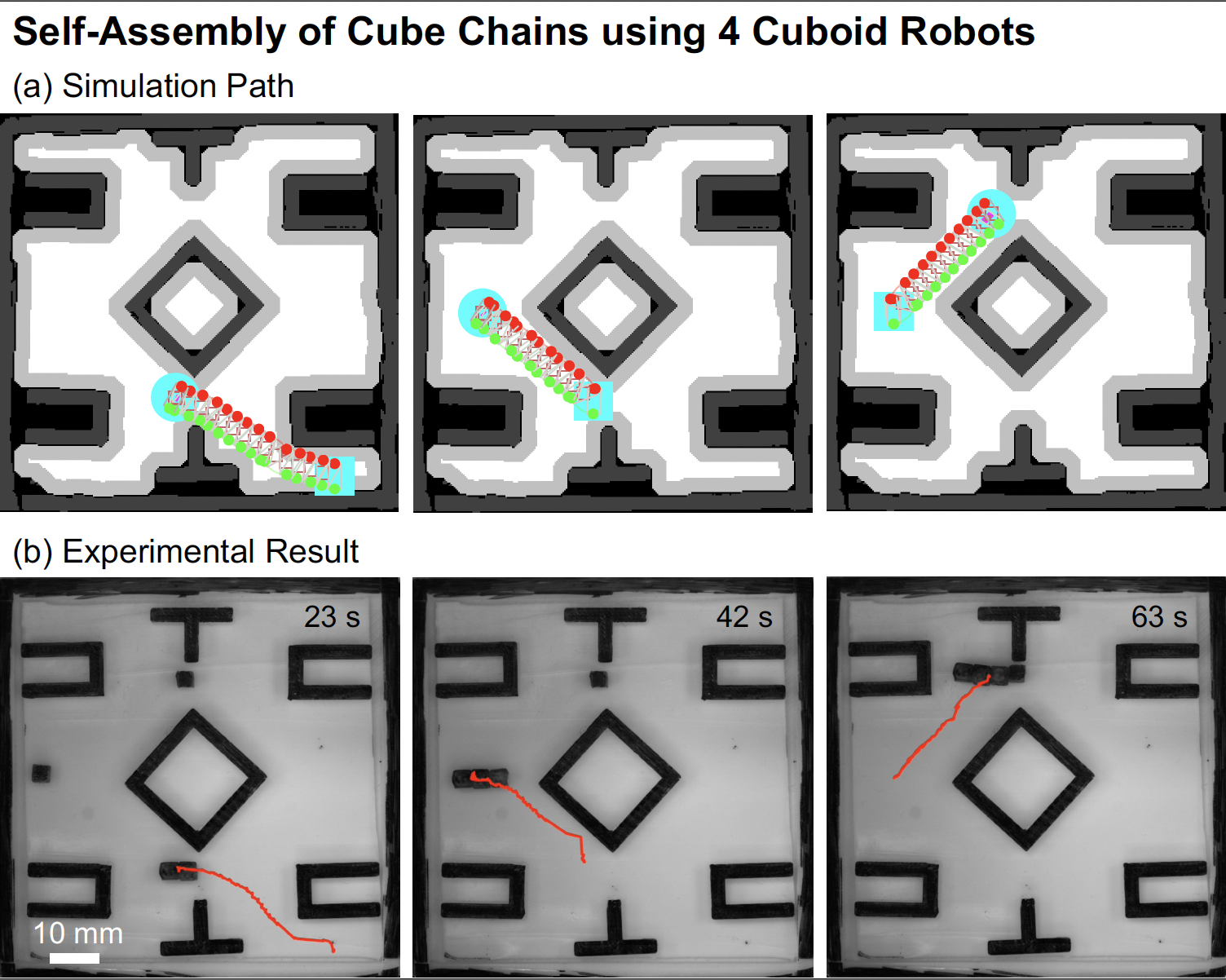
[J-08] Coordinated Self-Assembly and Feedback Control of Distributed Magnetic Cuboid Robots
Louis William Rogowski†, Gokhan Kararsiz†, Anuruddha Bhattacharjee†, Yitong Lu†, Zhengguang Wang, Xiao Zhang, Aaron T. Becker*, Min Jun Kim* Swarm Intelligence, vol. 20, no. 1, p. 1-20, January 2026 This work presents magnetically actuated cuboid robots capable of self-assembly, pivot-walking locomotion, and vision-based closed-loop 2D navigation with path planning in mazes. |
|
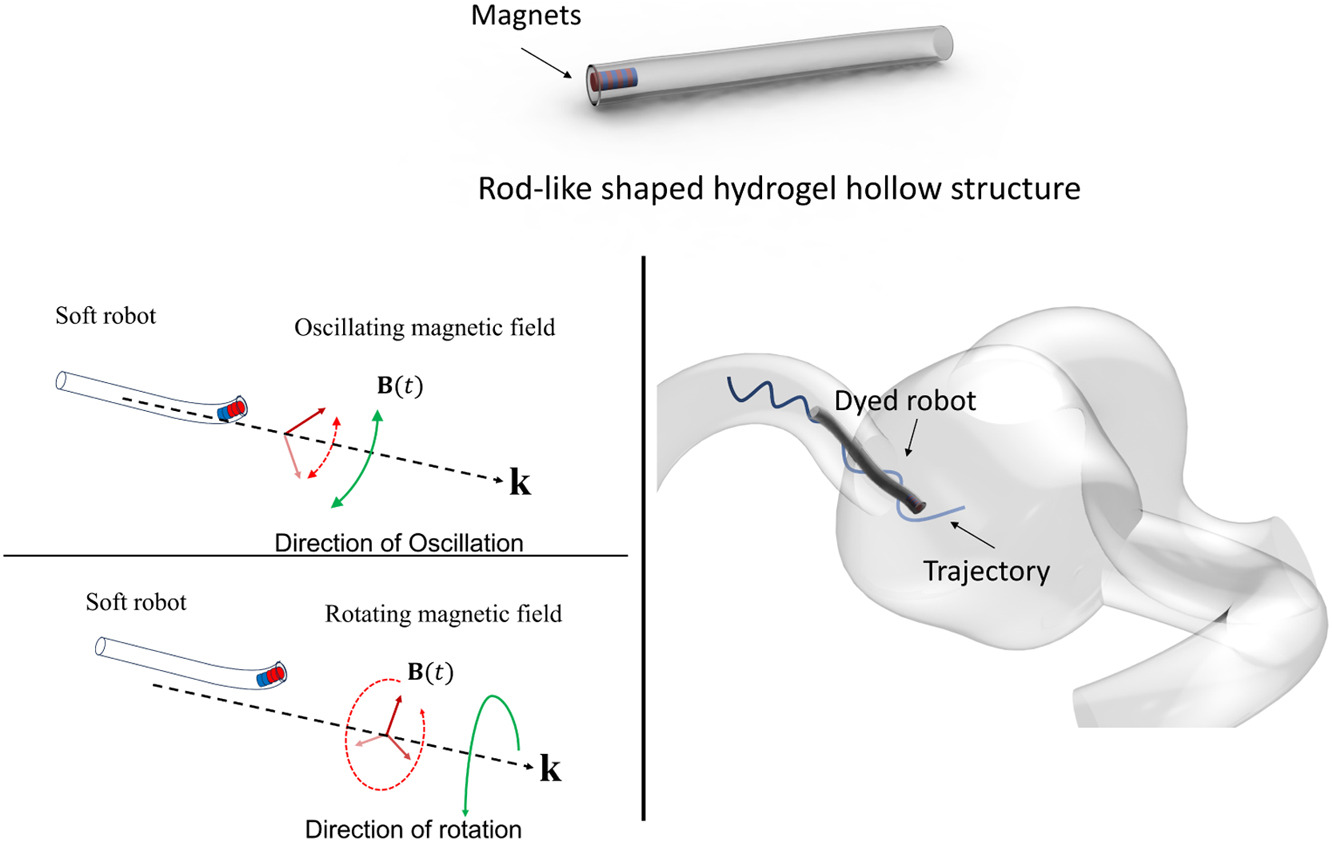
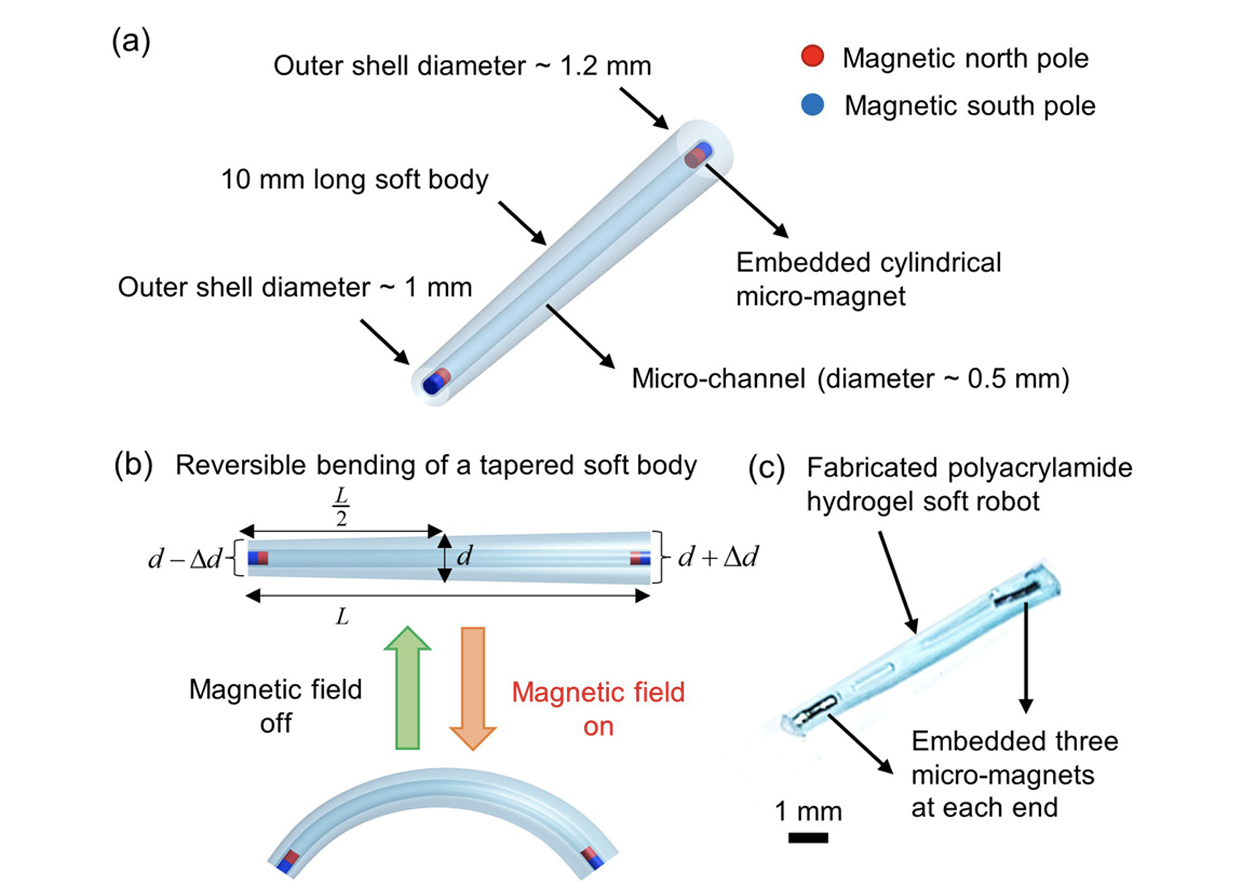
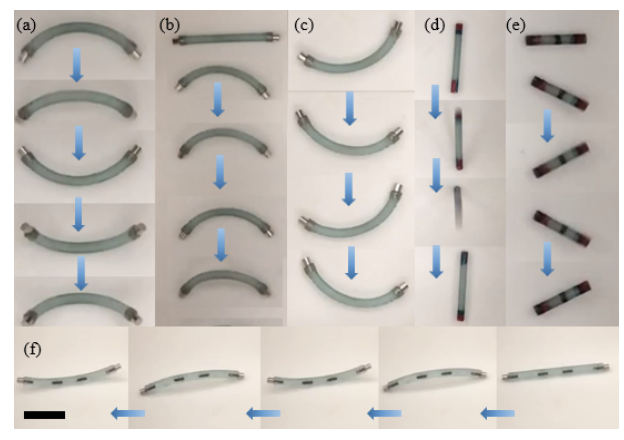
[J-07] Design, Modeling, and Control of Magnetically Actuated Rod-Like Soft Robots: Propulsion in Free Space with Viscous Fluids and Navigation in Confined Geometries
Zhengguang Wan, Anuruddha Bhattacharjee, Yasin Cagatay Duygu, Sangwon Lee, Mehdi Jabbarzadeh, Henry C. Fu, Min Jun Kim* Sensors and Actuators A: Physical, vol. 387, no. 1, p. 116305, June 2025 This work presents magnetically actuated, uniform rod-like soft robots, along with their numerical modeling and propulsion performance in viscous and constrained fluidic environments, including a human aneurysm model. |
|
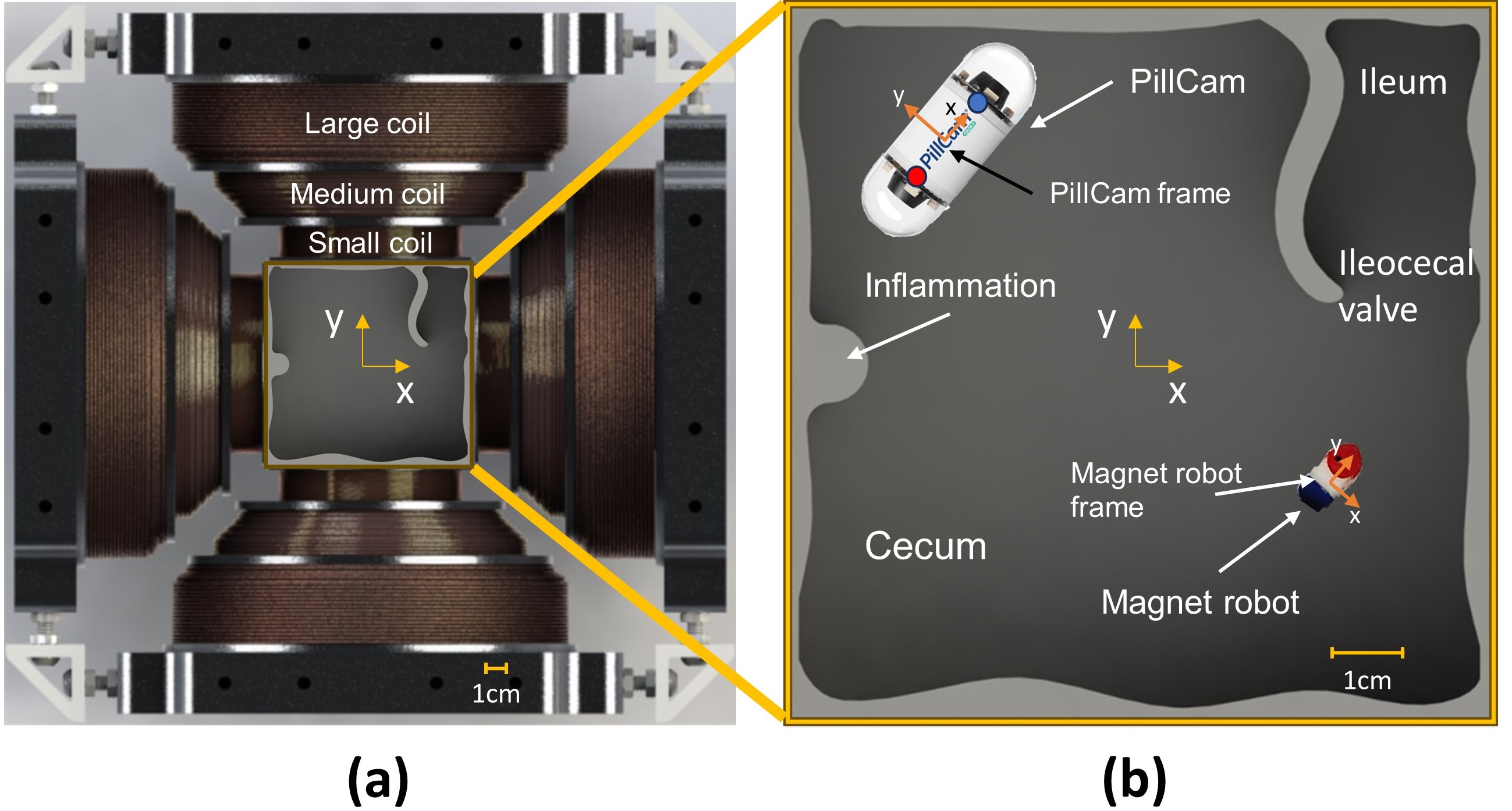
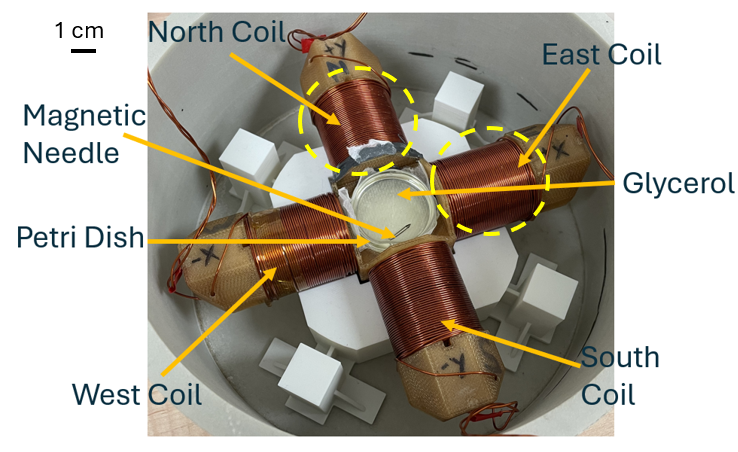
[J-06] Mitigating Singularities in Control of Magnetic Capsule Endoscopes Using a Novel Nested Electromagnetic Coil System
Xinhao Chen, Anuruddha Bhattacharjee, Lamar O. Mair, Suraj Raval, Pranav Addepalli, Onder Erin, Adrian Bell, Yancy Diaz-Mercado, and Axel Krieger Journal of Medical Robotics Research (JMRR), June 2024 This work introduces a novel nested electromagnetic coil system and a singularity-resolving controller for precise closed-loop control of magnetic robots, achieving sub-millimeter precision in trajectory tracking of a PillCam™ and a permanent magnet robot. |
|
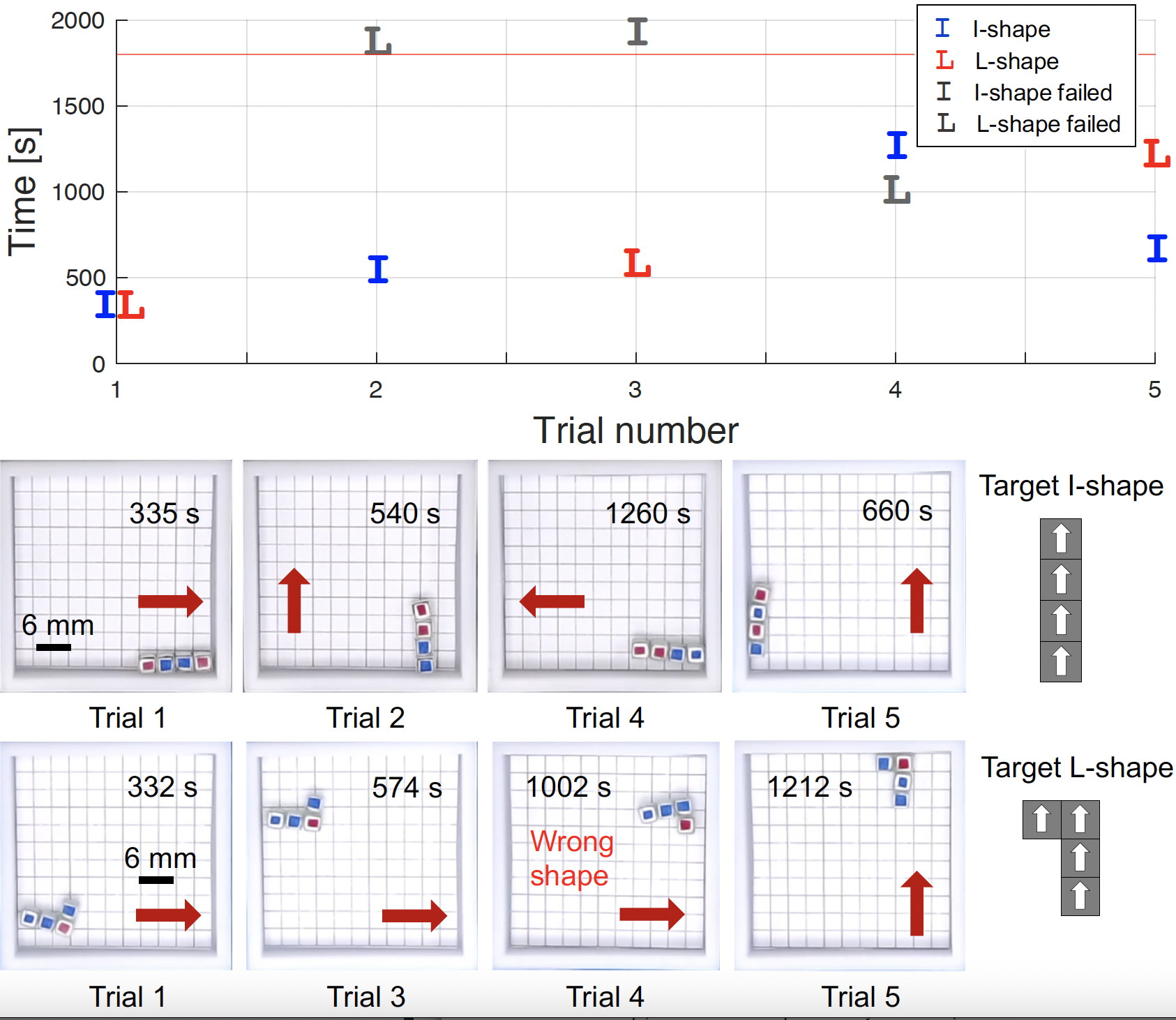
[J-05] Closed-Loop Control of Magnetic Modular Cubes for 2D Self-Assembly
Yitong Lu†, Anuruddha Bhattacharjee†, Conlan C. Taylor, Julien Leclerc, Jason M. O'Kane Min Jun Kim*, Aaron T. Becker*, IEEE Robotics and Automation Letters (RA-L), vol. 8, no. 9, p. 5998-6005, September 2023. This work presents a vision-guided closed-loop control method for self-assembling magnetic modular cubes into user-defined 2D polyomino shapes using uniform magnetic fields and boundary-assisted interactions across multiple length scales. |
|
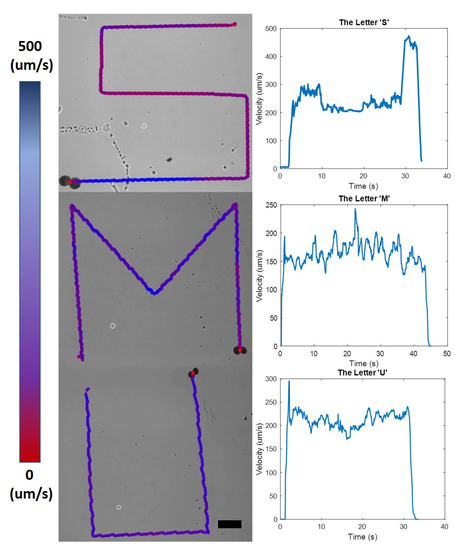
[J-04] Bacteria-inspired Magnetically Actuated Rod-like Soft Robot in Viscous Fluids
Anuruddha Bhattacharjee, Mehdi Jabbarzadeh, Gokhan Kararsiz, Henry C Fu, Min Jun Kim* Bioinspiration & Biomimetics, vol. 17, no. 6, p. 065001, September 2022. video This work presents a bacteria-inspired, magnetically actuated rod-like soft robot capable of swimming and boundary rolling in highly viscous fluids, with experimentally validated and simulated propulsion dynamics under low Reynolds number conditions. |
|
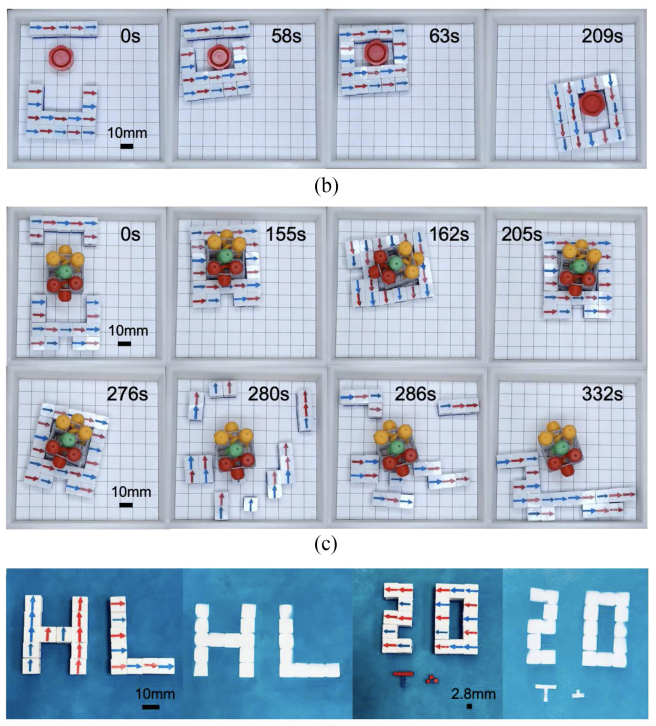
[J-03] Magnetically Controlled Modular Cubes with Reconfigurable Self-Assembly and Disassembly
Anuruddha Bhattacharjee†, Yitong Lu†, Aaron T. Becker*, Min Jun Kim* IEEE Transactions on Robotics (T-RO), vol. 38, no. 3, p. 1793-1805, June 2022. video This work presents a scalable modular robotic platform with programmable assembly–disassembly of magnetic cubes into 2D polyomino shapes using open-loop control and motion planning, demonstrating robust performance across varied length scales. |
|
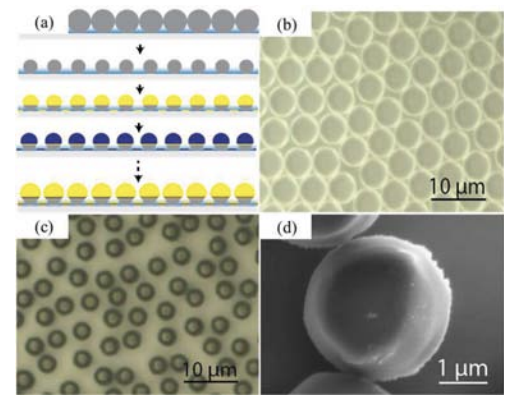
[J-02] Rolling Motion of a Soft Microsnowman under Rotating Magnetic Field
Gokhan Kararsiz, Yasin Cagatay Duygu, Louis William Rogowski, Anuruddha Bhattacharjee, Min Jun Kim* Micromachines, vol. 13, no. 7, p. 1005, June 2022 This work presents open-loop manipulation of snowman-shaped soft microrobots under a uniform rotating magnetic field. |
|
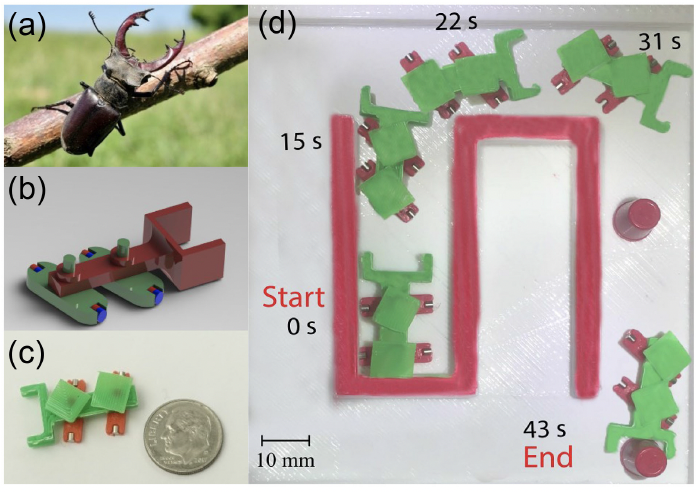
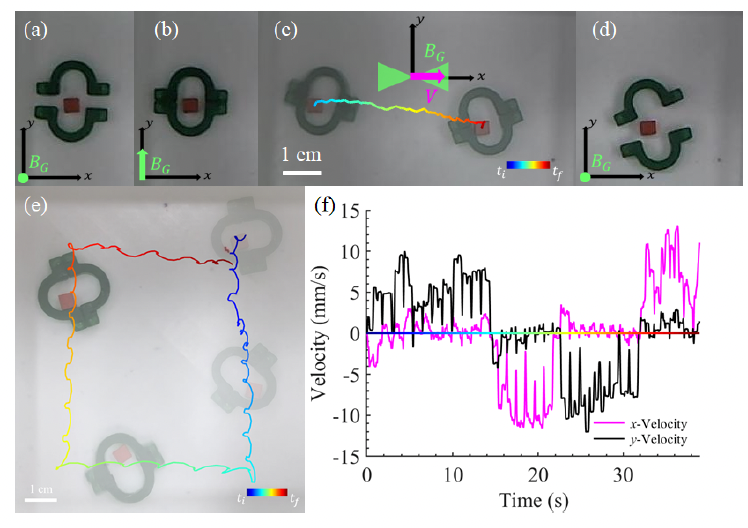
[J-01] Magnetically Actuated Simple Millirobots for Complex Navigation and Modular Assembly
Ehab Al Khatib, Anuruddha Bhattacharjee, Pouria Razzaghi, Louis William Rogowski, Min Jun Kim*, Yildirim Hurmuzlu* IEEE Robotics and Automation Letters (RA-L), vol. 5, no. 2, p. 2958-2965, April 2020 This work presents a low-cost millirobot that is simple in design, easy to fabricate, highly scalable, and can be used as modular sub-units within complex structures for large-scale manipulation. |
Peer-Reviewed Conference Papers
|
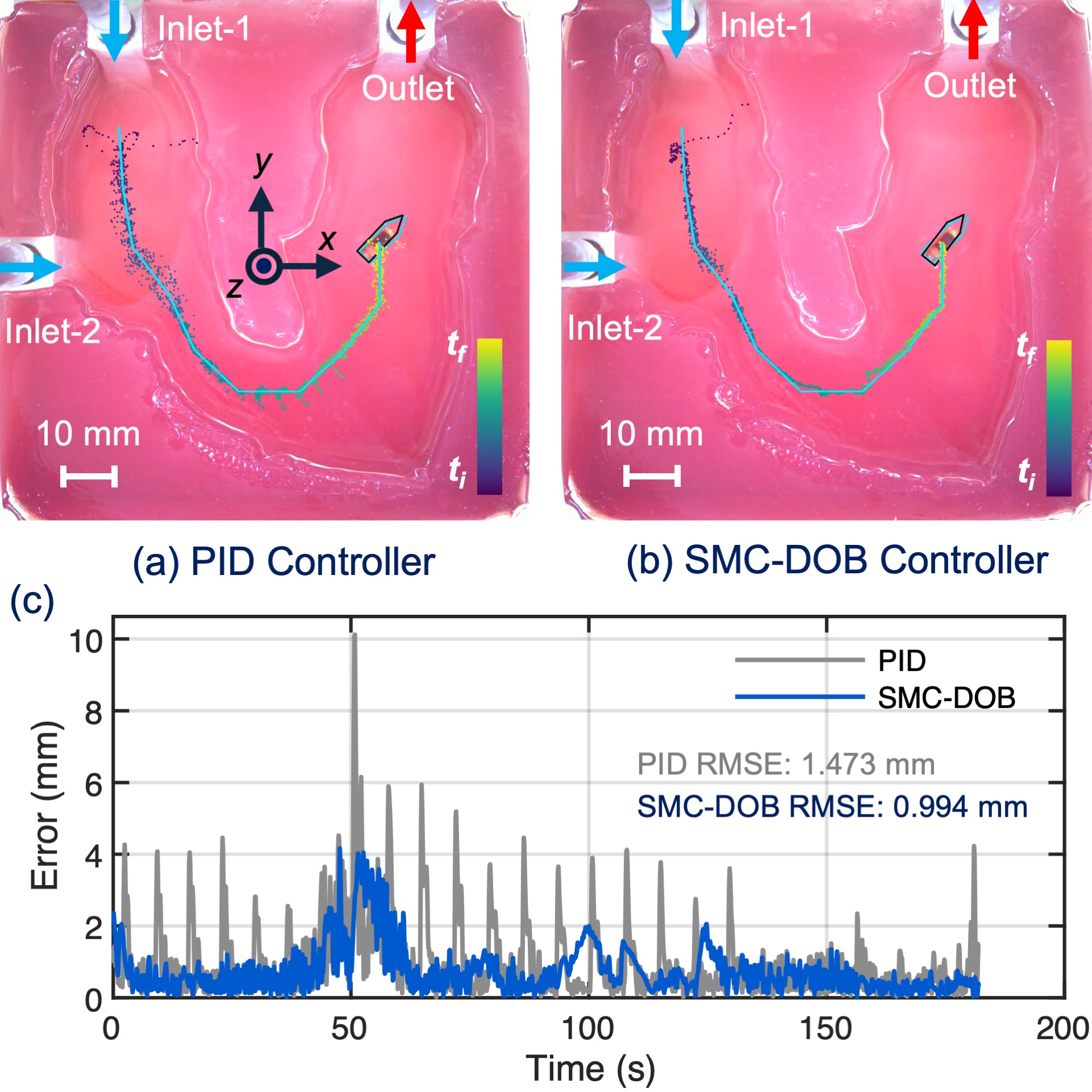
[C-14] Robust Autonomous Control of Magnetic Millirobot in In-Vitro Cardiac Flow Environment
Anuruddha Bhattacharjee, Xinhao Chen, Lamar O. Mair, Suraj Raval, Yancy Diaz-Mercado, and Axel Krieger 2026 IEEE International Conference on Robotics and Automation (ICRA), In Review, 2025. This paper presents a robust control framework combining UNet-based localization, A* planning, and a sliding mode controller with a disturbance observer (SMC-DOB controller) for multi-coil electromagnetic actuation of millirobots in pulsatile cardiac flow. |
|
[C-13] Fluoroscopy-Constrained Magnetic Robot Control via Zernike-Based Field Modeling and Nonlinear MPC
Xinhao Chen, Hongkun Yao, Anuruddha Bhattacharjee, Suraj Raval, Lamar O. Mair, Yancy Diaz-Mercado, and Axel Krieger 2026 IEEE International Conference on Robotics and Automation (ICRA), In Review, 2025. This paper presents a control framework that remains accurate and stable under low frame-rate fluoroscopic imaging by combining a nonlinear model predictive control (NMPC) framework that directly outputs coil currents, an analytically differentiable magnetic field model based on Zernike polynomials, and a Kalman filter to estimate the robot state. |
|
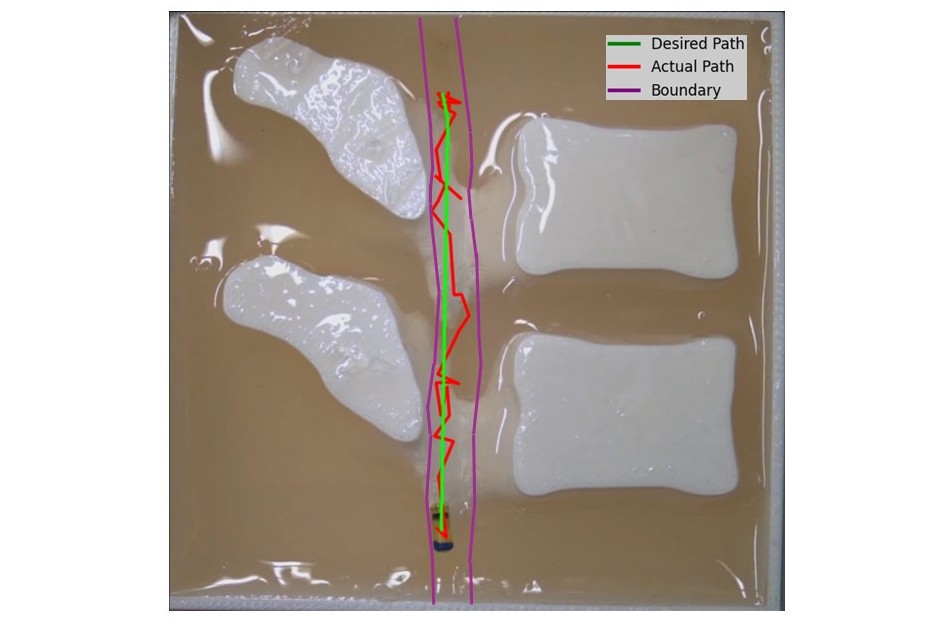
[C-12] Semi-Autonomous 2.5D Control of Untethered Magnetic Suture Needle
Qinhan Wang, Anuruddha Bhattacharjee, Xinhao Chen, Lamar O. Mair, Yancy Diaz-Mercado, and Axel Krieger 2025 IEEE International Conference on Robotics and Automation (ICRA), Atlanta, GA, USA, 2025, p. 10681-10687. This work introduces a semi-autonomous control strategy for an untethered magnetic suture needle for robotic suturing tasks in bladder repair surgery, experimentally validated through suturing on tissue-mimicking gel phantoms. |
|
[C-11] Singularity-Free Approximate Waypoint Tracking Controller for Underactuated Magnetic Robots
S. Raval, Anuruddha Bhattacharjee, X. Chen, L. Mair, A. Krieger, Y. Diaz-Mercado IFAC-PapersOnLine, vol. 58, no. 28, pp. 1079-1084, 2025 Presents a novel controller for robust waypoint tracking in magnetic robots, avoiding singularities using field-based planning and optimal current control. |
|
[C-10] Closed Loop Vision Guided Control of Flyer Position for High-Throughput Laser Shock Experiments
Heyun Wang, Jacob M. Diamond, Anuruddha Bhattacharjee, Piyush Wanchoo, Ahmad Mirzaei, Liuchi Li, T. Joseph Nkansah-Mahaney, K.T. Ramesh, and Axel Krieger ASME IMECE, 2024 Introduces a vision-based automation framework for precise control of flyer targets in high-throughput laser-driven impact experiments. |
|
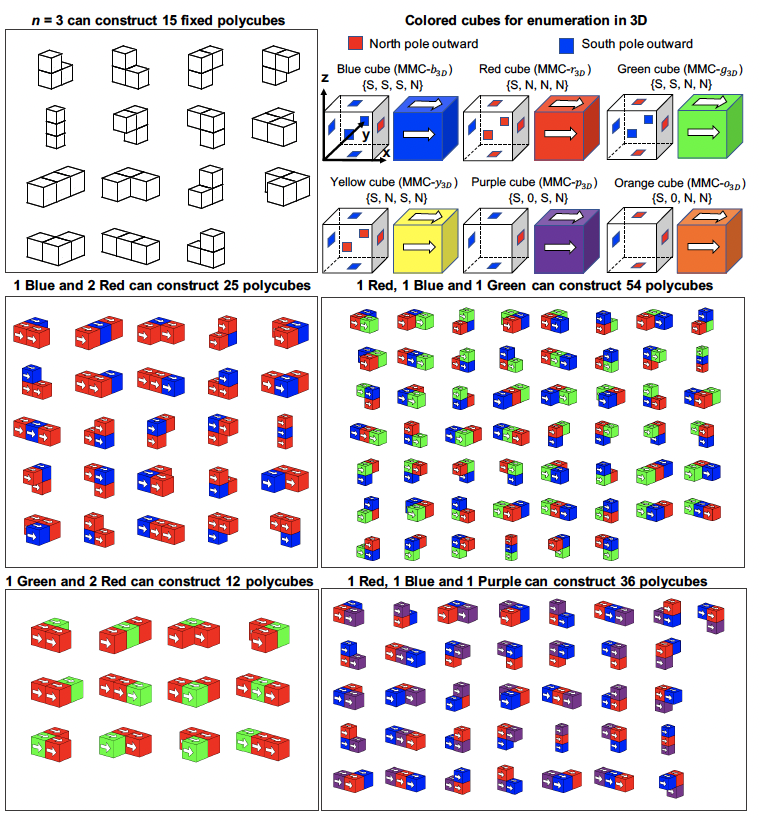
[C-9] Enumeration of Polyominoes & Polycubes Composed of Magnetic Cubes
Yitong Lu, Anuruddha Bhattacharjee, Daniel Biediger, Min Jun Kim, and Aaron T. Becker IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021, pp. 6977-6982 Enumerates all reachable configurations of magnetic modular cubes for self-assembling polyomino and polycube shapes under uniform magnetic fields. |
|
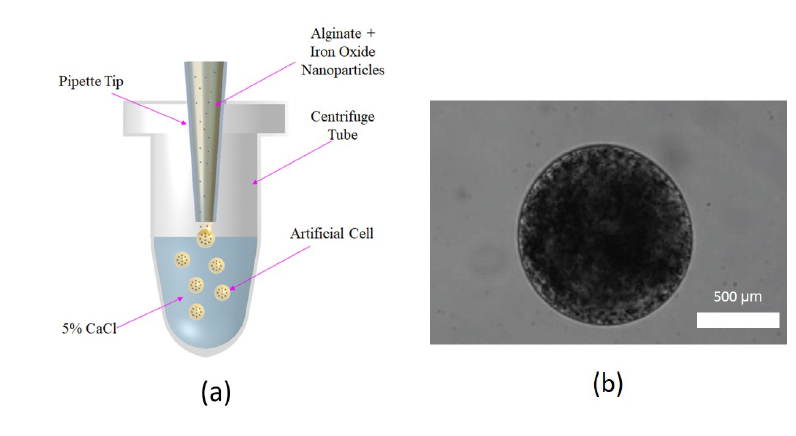
[C-8] Adaptive Tracking Controller for an Alginate Artificial Cell
Gokhan Kararsiz, Louis William Rogowski, Xiao Zhang, Anuruddha Bhattacharjee, Min Jun Kim IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021 Introduces an adaptive control strategy to track the motion of a biologically-inspired alginate artificial cell under external magnetic actuation. |
|
[C-7] Magnetically Programmable Cuboids for 2D Locomotion and Collaborative Assembly
Louis William Rogowski, Anuruddha Bhattacharjee, Xiao Zhang, Gokhan Kararsiz, Henry C. Fu, Min Jun Kim IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020 Demonstrates programmable 2D motion and collaborative assembly of magnetic cuboid robots under uniform rotating magnetic fields with boundary-assisted control. |
|
[C-6] Untethered Soft Millirobot with Magnetic Actuation
Anuruddha Bhattacharjee, Louis William Rogowski, Xiao Zhang, Min Jun Kim 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 2020, pp. 3792-3798. video Presents a rod-like soft robot actuated magnetically in free space and constrained environments, with numerical modeling and experimental propulsion validation. |
|
[C-5] Feedback Control and 3D Motion of Heterogeneous Janus Particles
Louis William Rogowski, Xiao Zhang, Li Huang, Anuruddha Bhattacharjee, Jung Soo Lee, Aaron T. Becker, Min Jun Kim 2019 IEEE International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 2019, pp. 1352-1357. Proposes feedback control strategies for heterogeneous Janus particles with controllable 3D magnetic locomotion in fluid environments. |
|
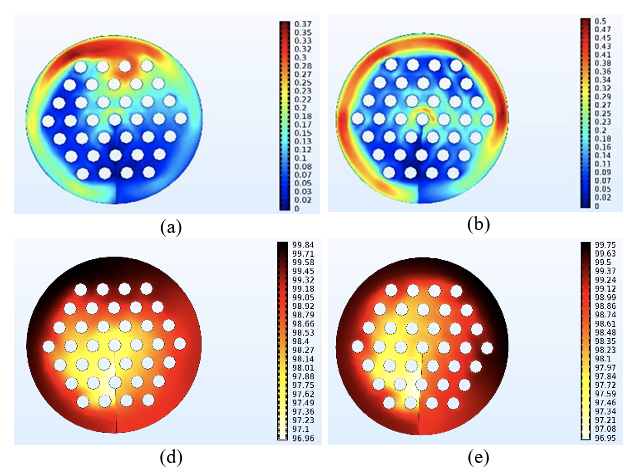
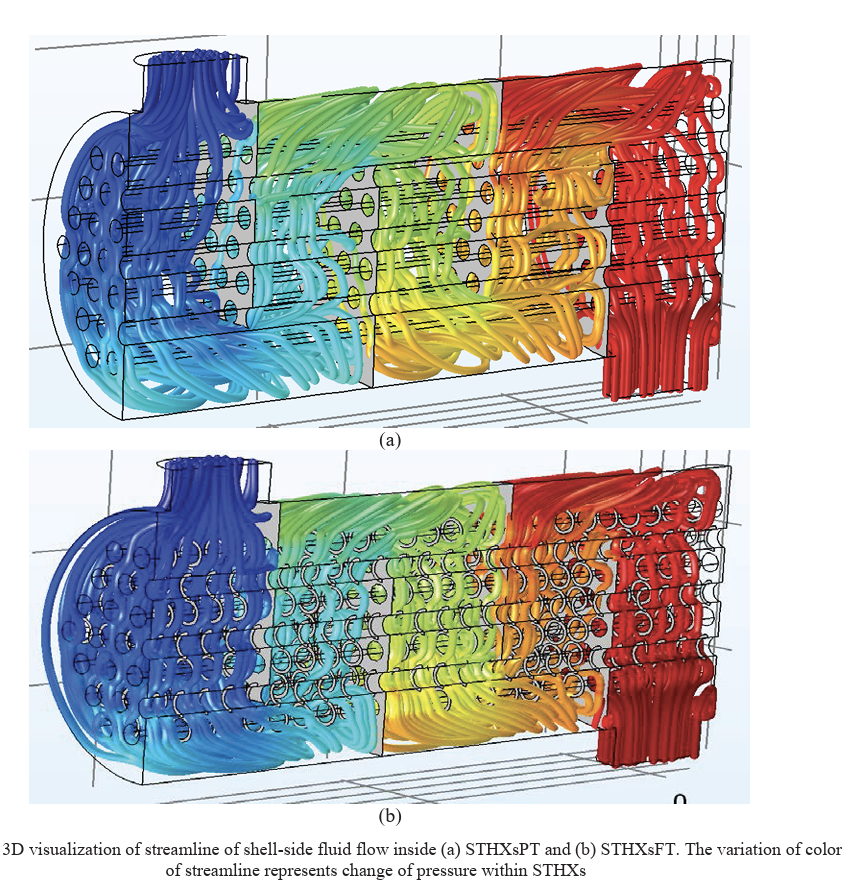
[C-4] Influence of Helix Angle on the Performance of Shell-and-Tube Heat Exchanger with Continuous Helical Baffle
Anuruddha Bhattacharjee, Asif Ahmed, Sumon Saha AIP Conference Proceedings, vol. 1980, p. 050012, 2018 Numerical investigation of heat exchanger performance enhancement by optimizing the helix angle of continuous helical baffles. |
|
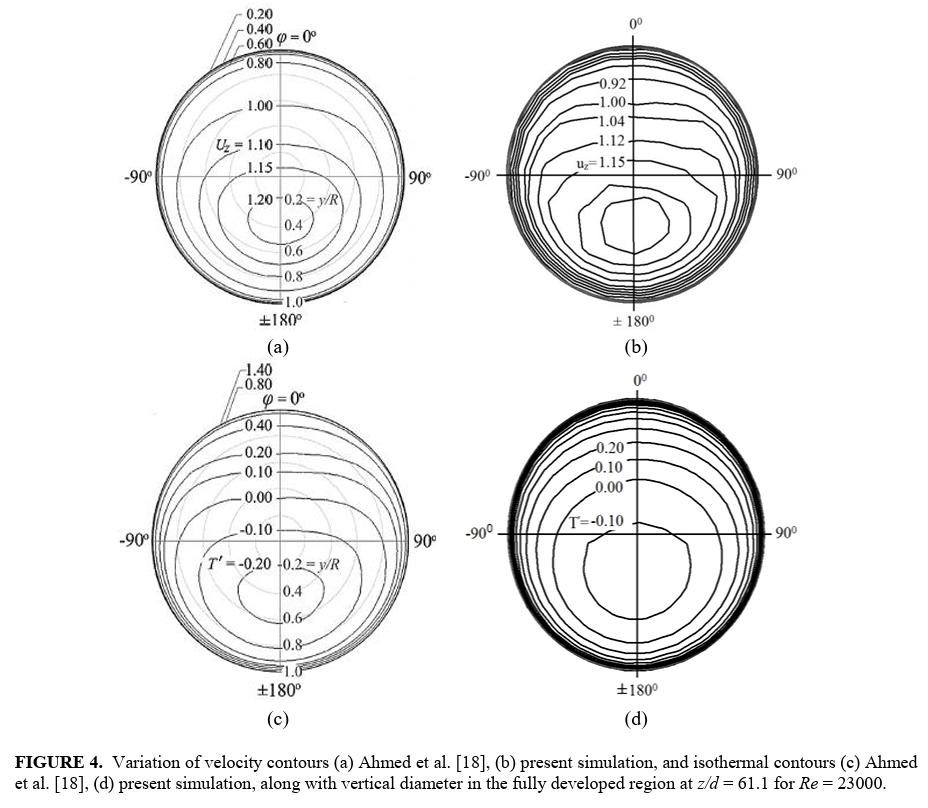
[C-3] Numerical Simulation of Turbulent Mixed Convective Pipe Flow
Sayeed Mohammed, Anuruddha Bhattacharjee, Sumon Saha AIP Conference Proceedings, vol. 1980, p. 050029, 2018 Conducts a CFD study on turbulent mixed convection flow in pipes, analyzing thermal and velocity profiles under different boundary conditions. |
|
[C-2] Comparison of Performance of Shell-and-Tube Heat Exchangers with Plain and Annular-Finned Tube Bundle
Asif Ahmed, Anuruddha Bhattacharjee, Sumon Saha AIP Conference Proceedings, vol. 1919, p. 020019, 2017 Investigates thermal performance of finned versus plain tube bundles in shell-and-tube heat exchangers using CFD simulations. |
|
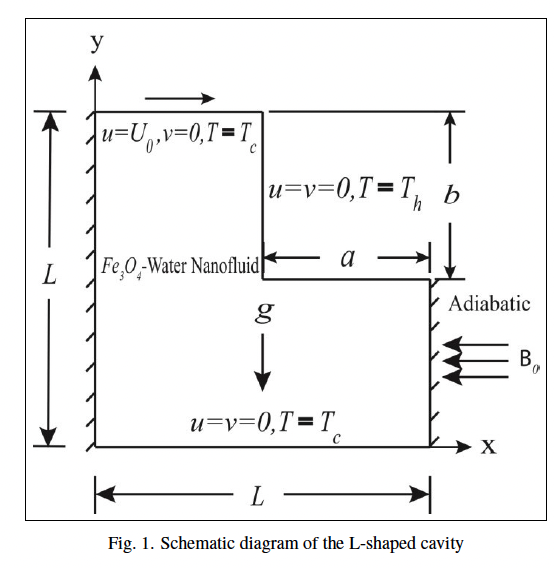
[C-1] Unsteady MHD Mixed Convection inside L-shaped Enclosure in the Presence of Ferrofluid (Fe₃O₄)
Nandita Chakrabarty Jhumur, Anuruddha Bhattacharjee Procedia Engineering, vol. 194, p. 494-501, 2017 Simulates transient MHD mixed convection in an L-shaped enclosure filled with ferrofluid, highlighting effects on heat transfer and fluid flow. |
|
© Copyright Anuruddha Bhattacharjee. All Rights Reserved. |